Hopefully, by now we’re feeling pretty comfortable with the use of a Riemann sum to create an integral formula. So far, these integral formulas have matched with our intuition somewhat. We probably can justify the integral formula for displacement of an object (Definition 6.1.3 Displacement of an Object) by thinking about the fact that position is an antiderivative of velocity. We probably can convince ourselves about the integral formula for the area between curves (Definition 6.2.5 Area Between Curves) by thinking about subtracting areas, geometrically.
Here’s the basic idea, in a broad overview: if we want to calculate a volume, then we are going to be working with a 3-dimensional solid. We’ll use the slice-and-sum process:
Slice the object into uniformly thick slices along some axis.
For each slice, we’ll approximate the volume. We can do this by thinking about the cross-sectional area. If we assume that the area is constant all the way through the slice (in the same way that we assumed earlier that the heights of our rectangles were constant), then we simply can multiply the cross-sectional area by the thickness to get the volume of each slice:
Here, \(a\) and \(b\) are the \(x\)-values that define the interval we’re slicing along and \(A(x)\) is a formula for the cross-sectional area of the object at \(x\text{.}\)
The biggest issue here is going to be thinking about that formula for area. In order for us to do that, we’re going to think about a specific type of 3-dimensional solid, built in a systematic way so that we can find the cross-sectional areas easily.
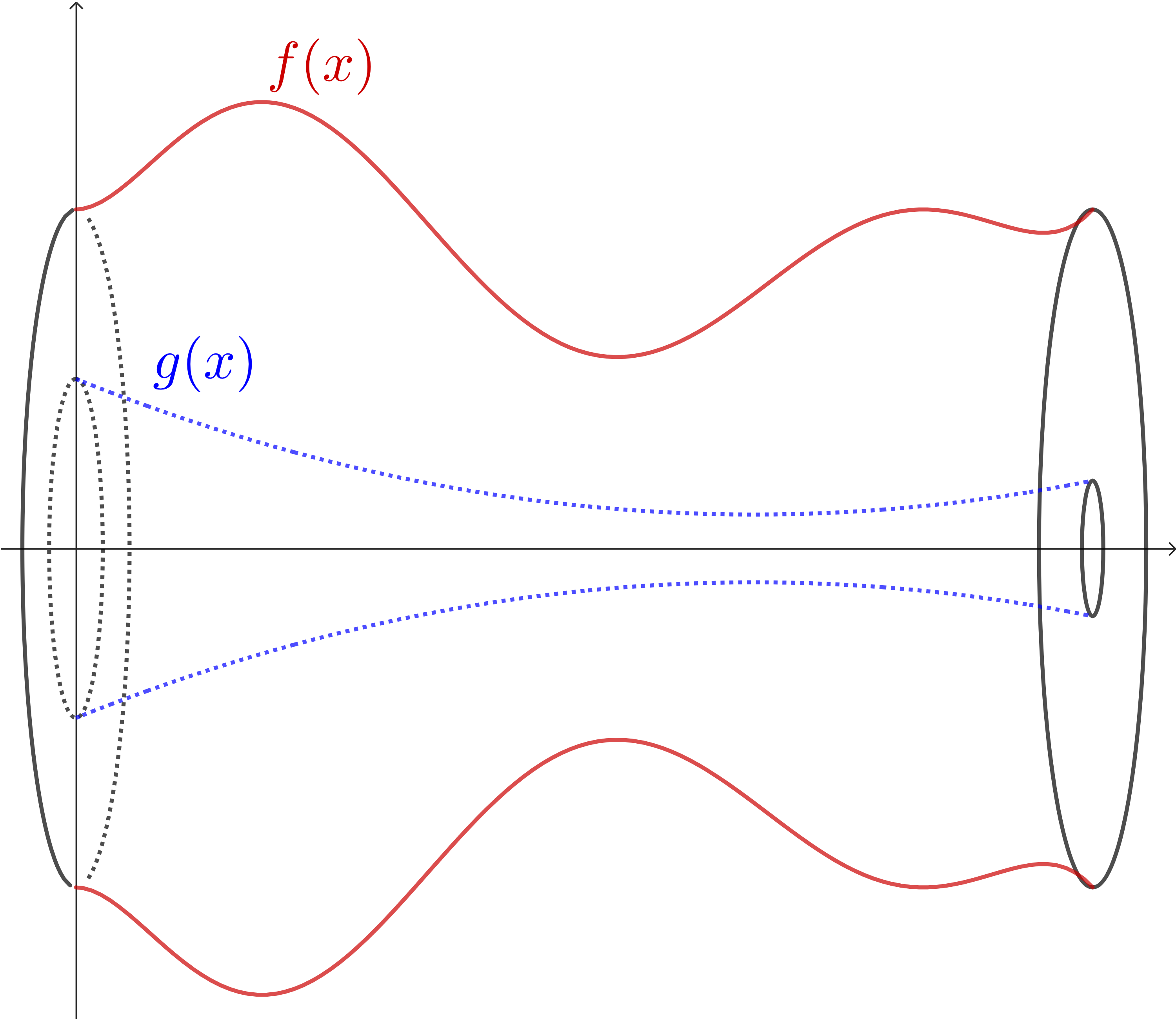
A solid of revolution is a strange type of solid: we’re going to define it based on a 2-dimensional region (we’ll use functions in a normal \(xy\)-plane) that we then imagine revolving around a straight line axis. Maybe we define some region in the upper half of the plane, but then revolve it around the \(x\)-axis. While we imagine this revolution, we want to think about the three dimensional solid that gets "traced" by the curve spinning around the axis. Let’s dive into an example to see.
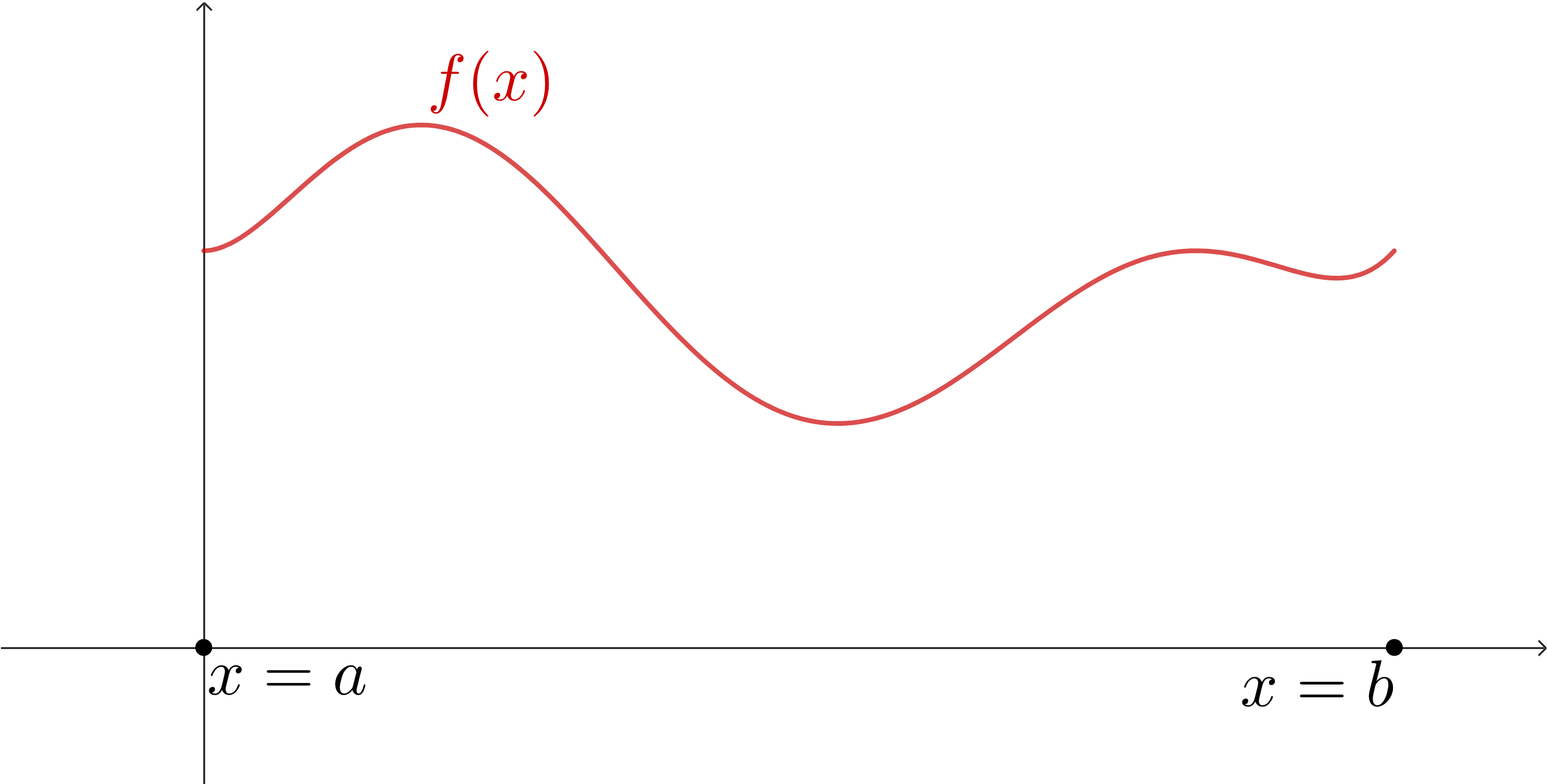
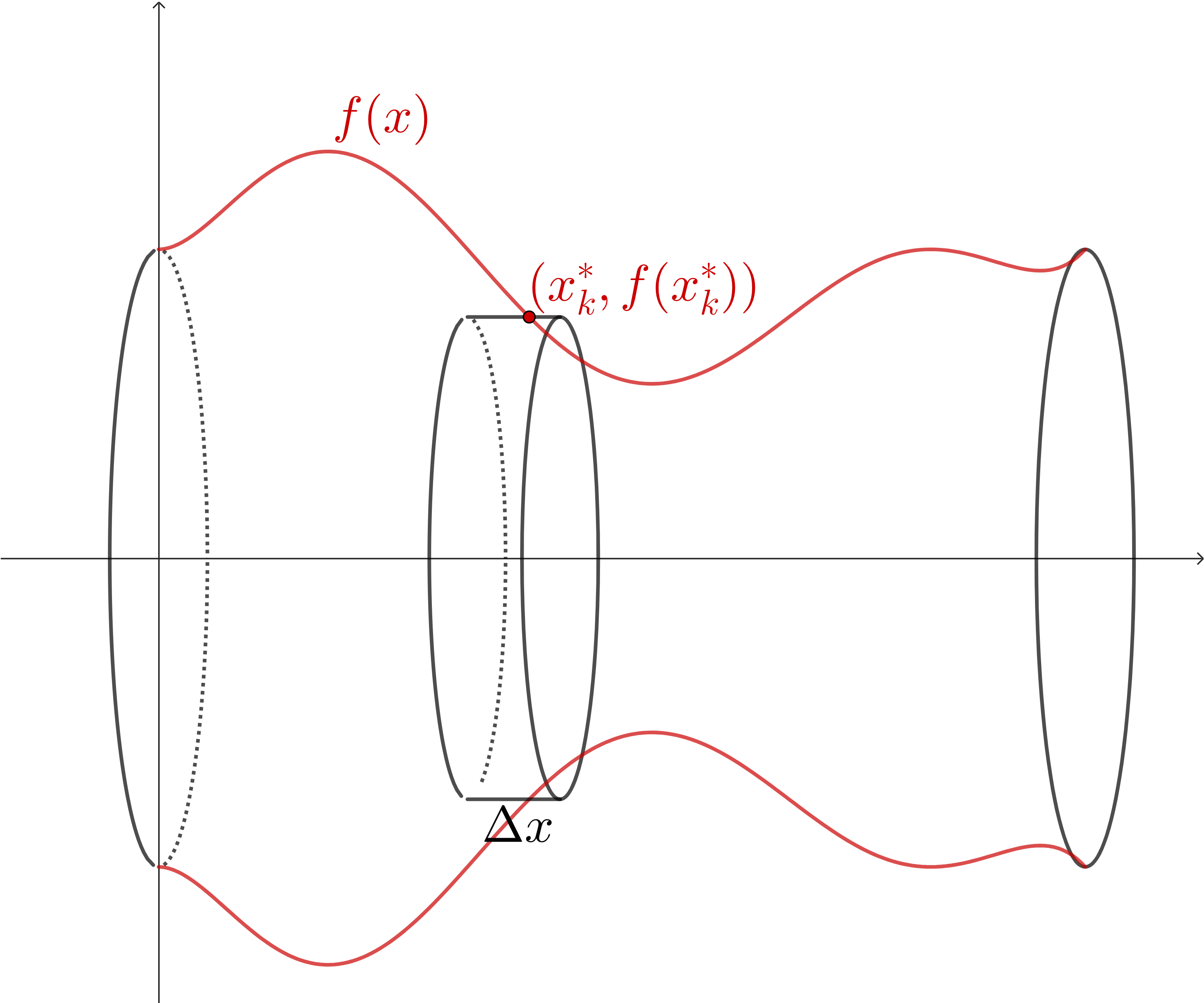
Let’s visualize some function \(f(x)\) defined (and continuous) on the interval \([a,b]\) and with \(f(x)\geq 0\) on that interval. We’ll see why this is useful, but for now, we’re just thinking of some function.
So our goal is to find the volume of this type of solid. The curve defining the edge of it can change, but the way that we create it will be systematic enough that we can build a formulaic integral expression for it.
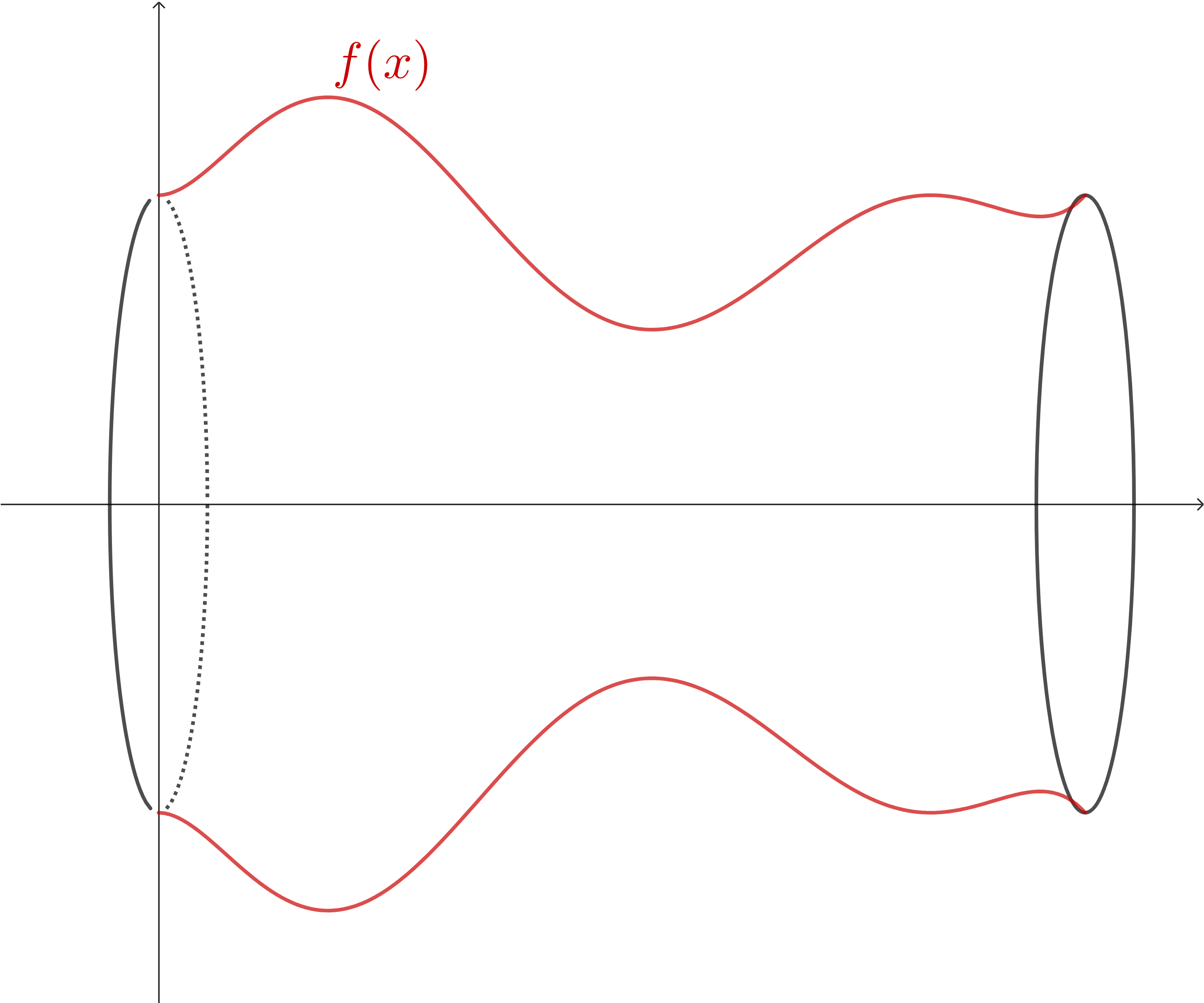
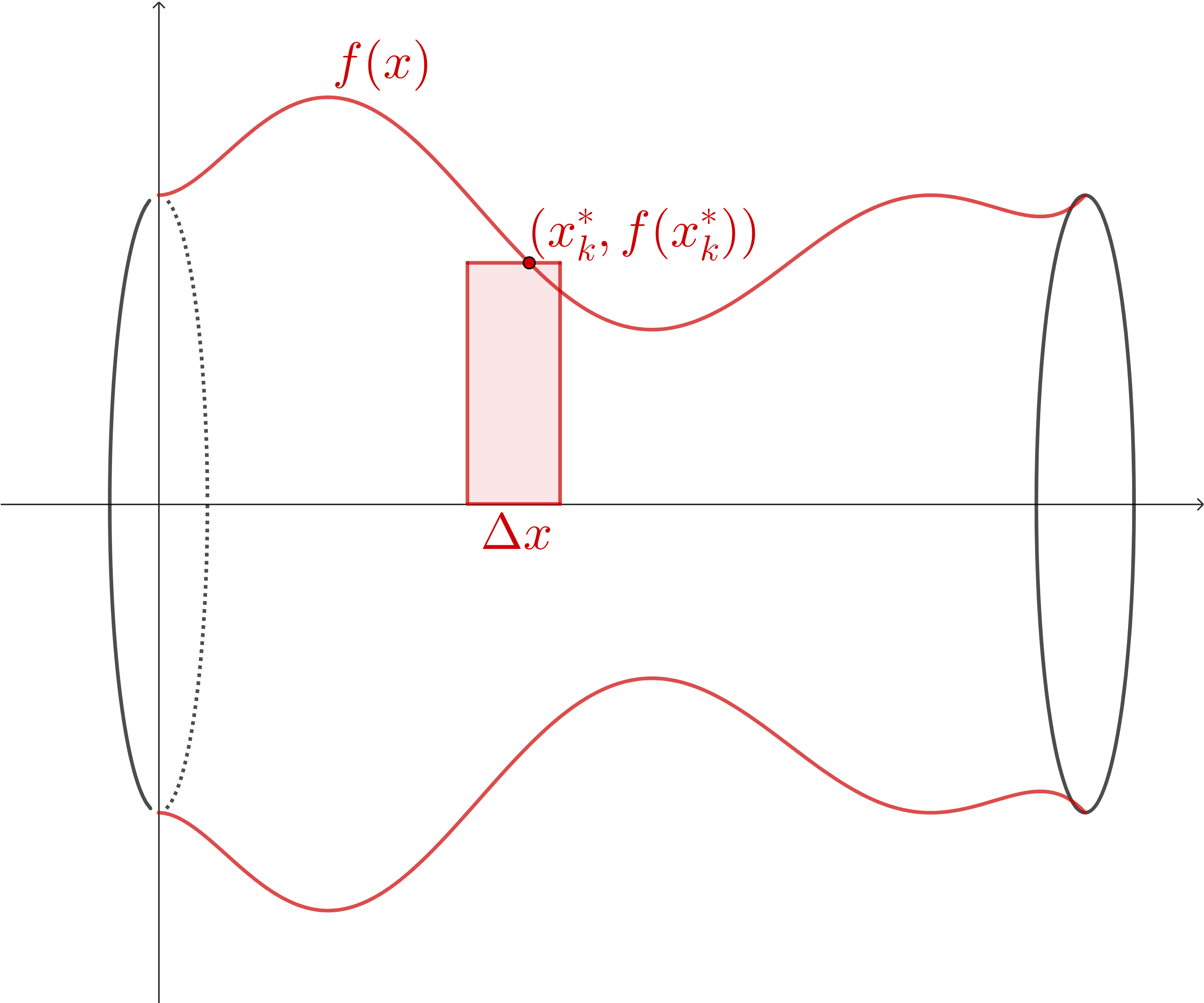
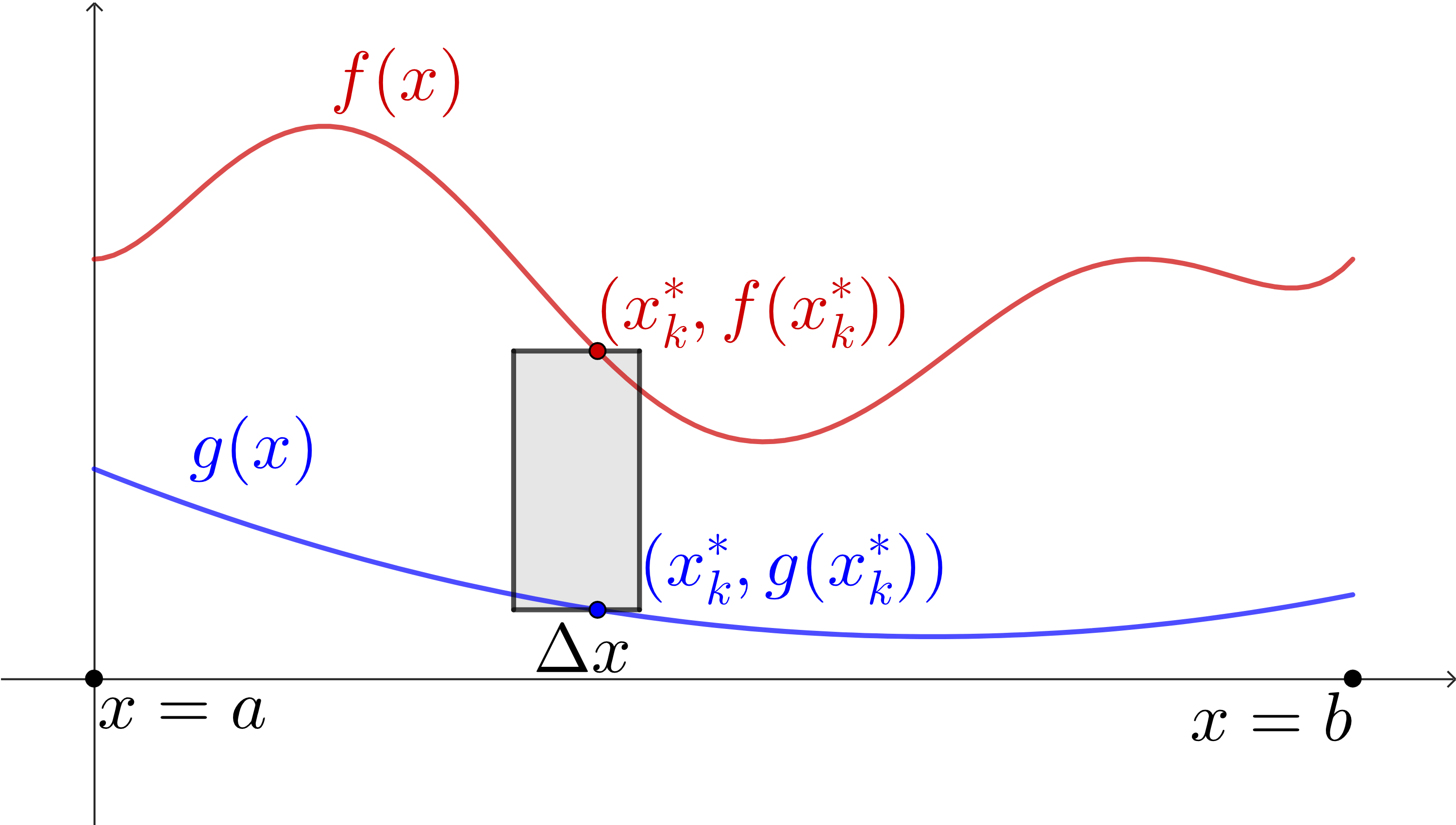
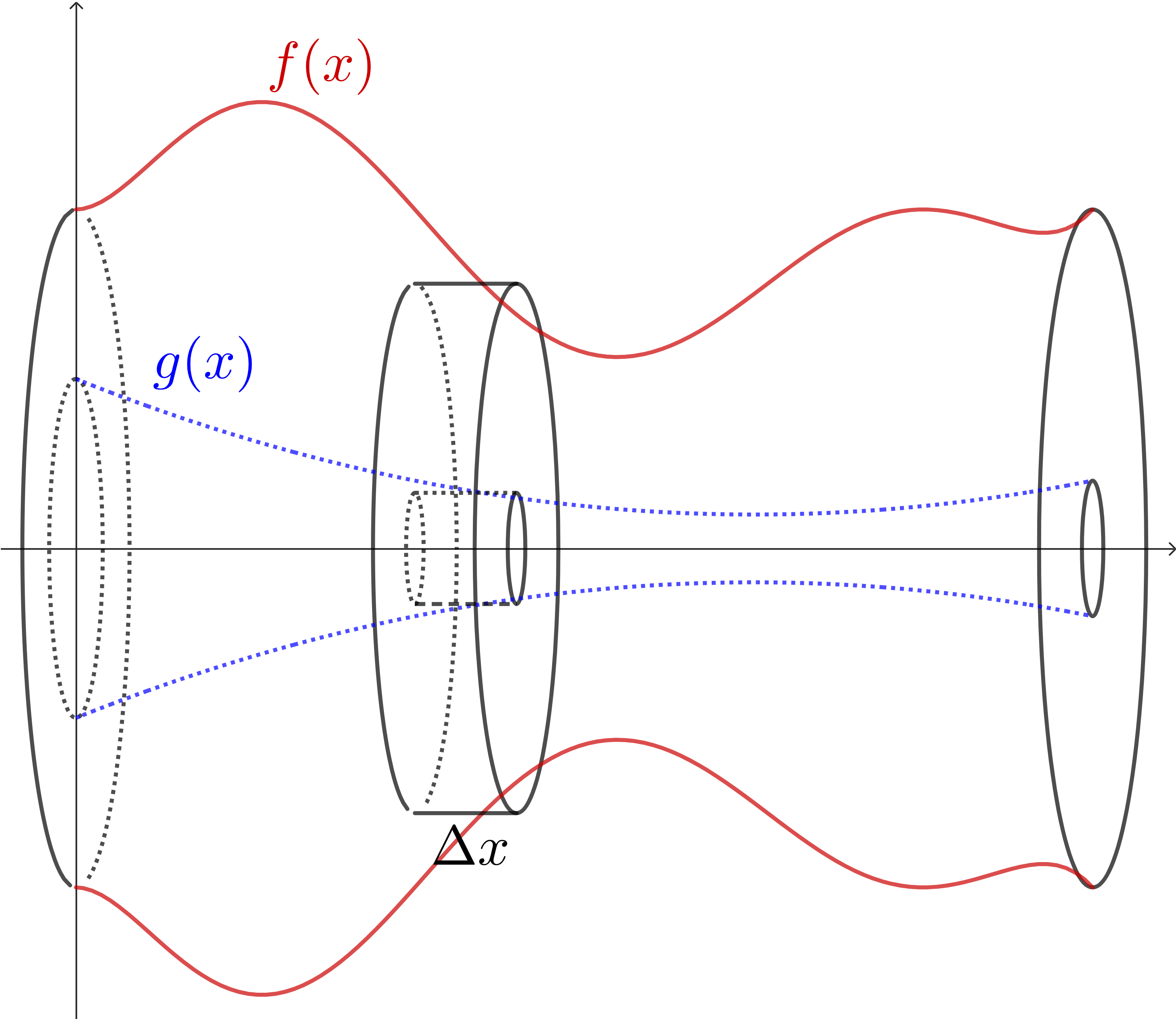
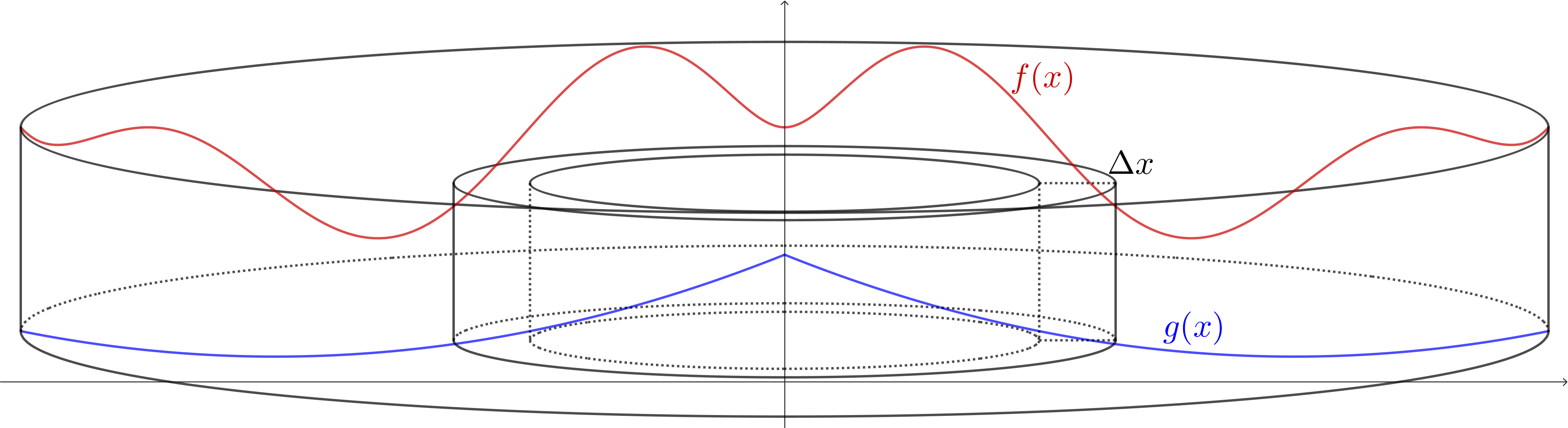
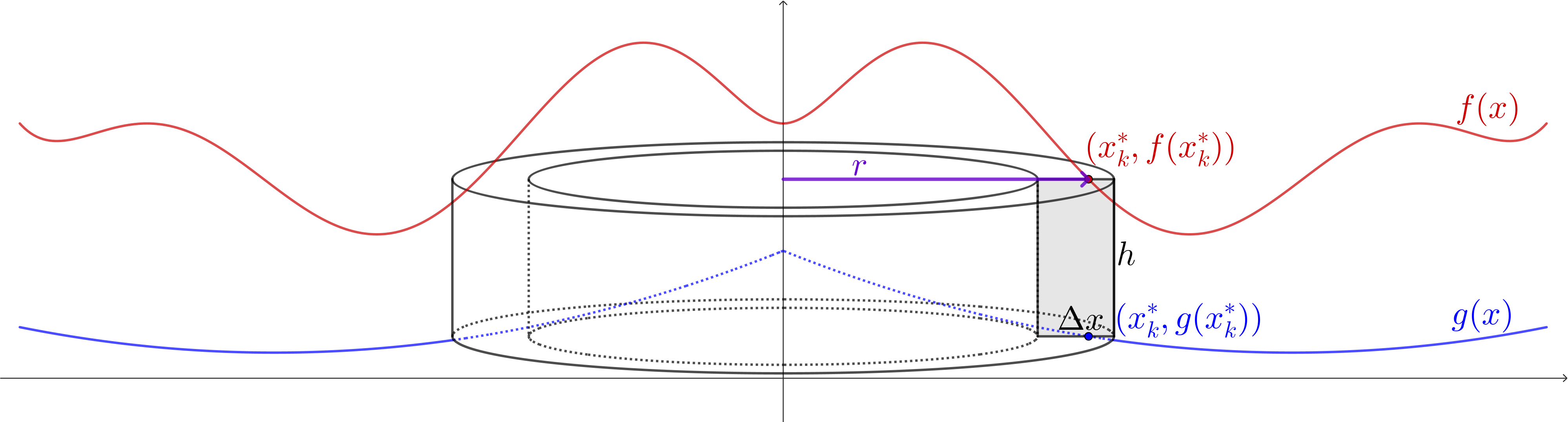
This rectangle will represent a single, generic slice. We really want to imagine a slice of the 3-dimensional solid, though, and so we will revolve this rectangle around the \(x\)-axis. This will create a slice of our solid of revolution. From there, we can think about the volume of this generic \(k\)th slice, and fall into the rhythm of our slice-and-sum process.
We want to find the volume of this specific slice. To do this, we can remove this stubby cylinder from the solid and think about it directly. We can see the thickness of the slice is represented by \(\Delta x\text{,}\) and so we need to think about the cross-sectional area of the "face" of this slice.
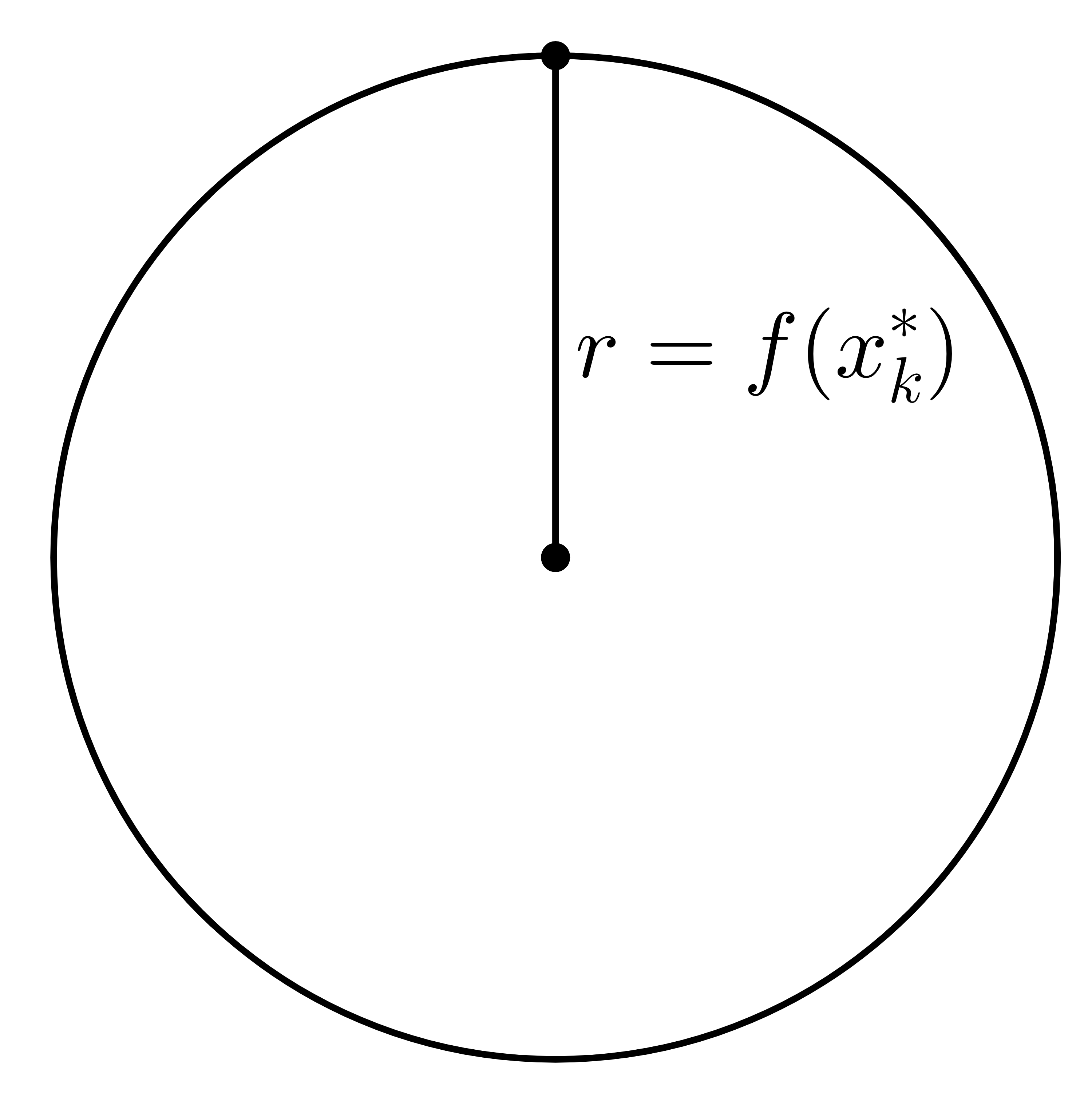
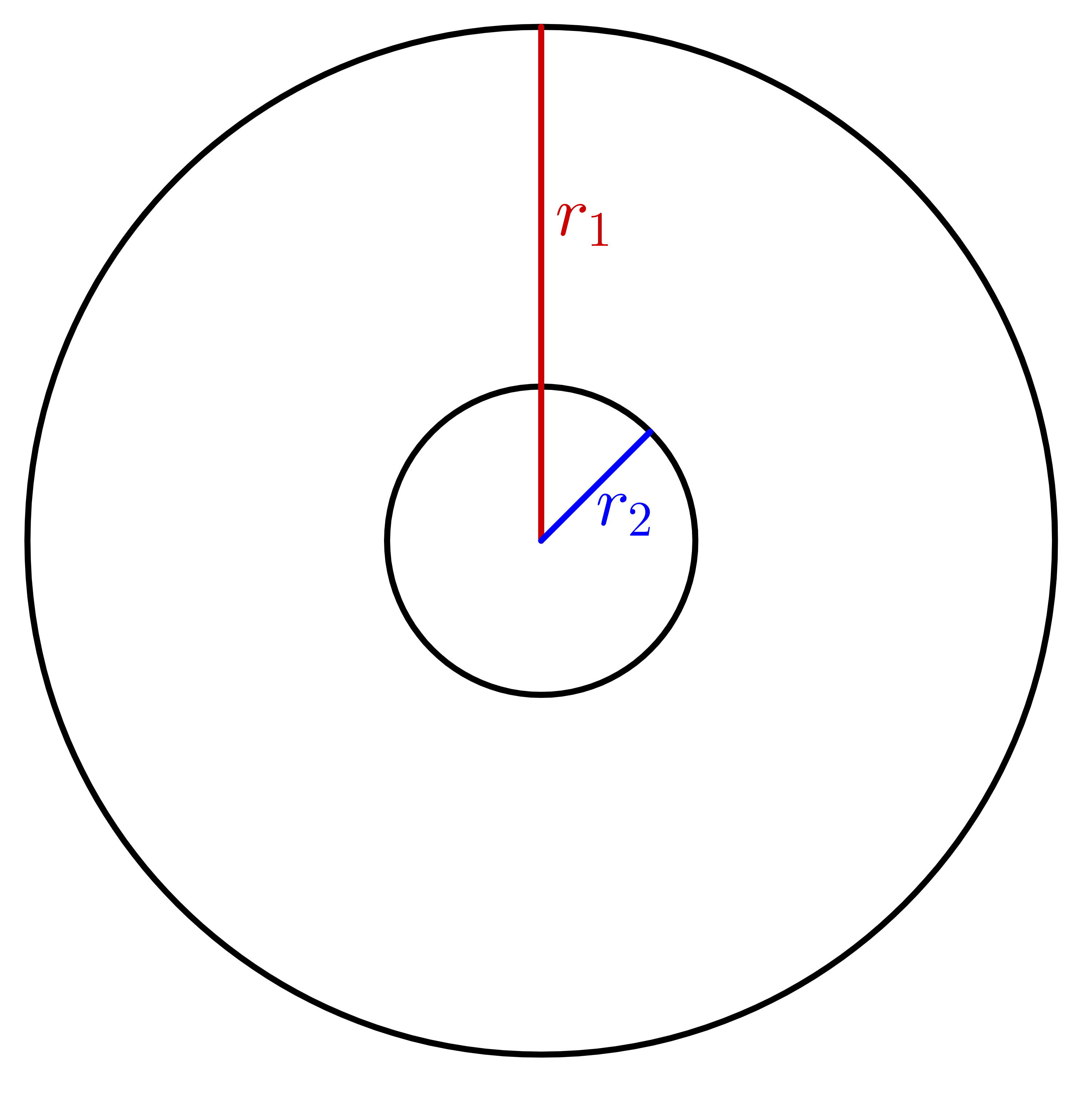
This is something we easily can find the area of! We know the formula for the area of a circle: \(A=\pi r^2\text{.}\) We’ll notice that the radius of this circle is the distance from the center of our slice to the outer edge: this is the height of the rectangle in Figure 6.3.3. So we can use \(r=f(x_k^*)\text{,}\) giving us the cross-sectional area of the \(k\)th slice:
We can approximate the volume by adding the slices:
\begin{equation*}
V \approx \sum_{k=1}^n \pi\left(f(x_k^*)\right)^2 \Delta x
\end{equation*}
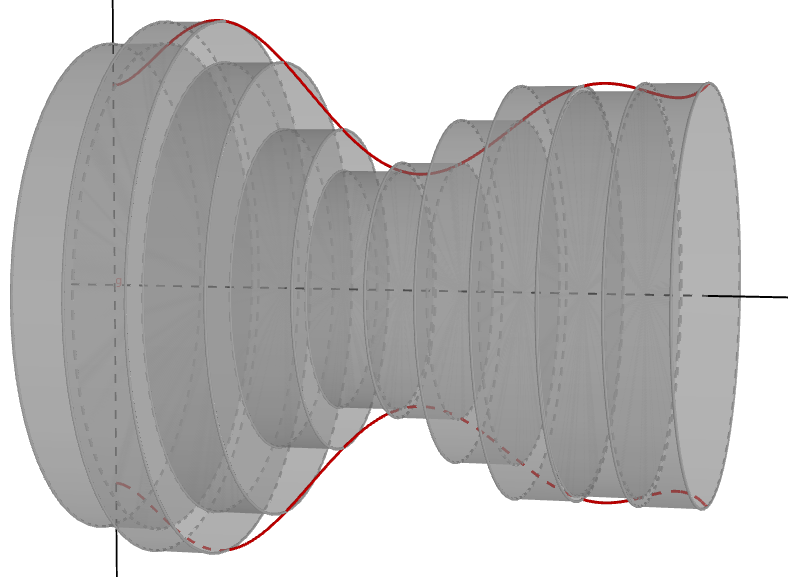
Sometimes this can be hard to visualize. We’re approximating the solid in Figure 6.3.2 by thinking about a bunch of these circular disks stacked next to each other.
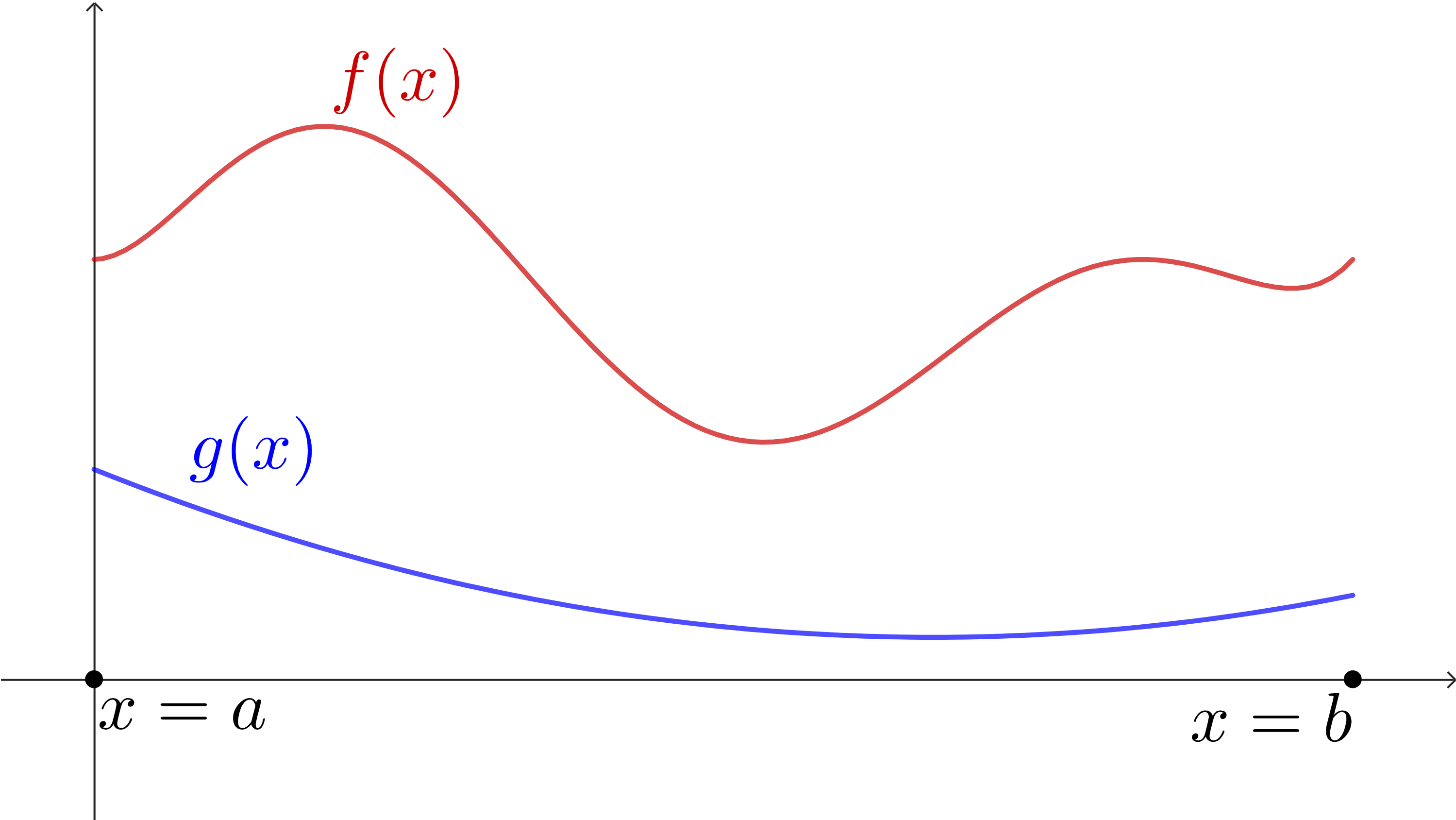
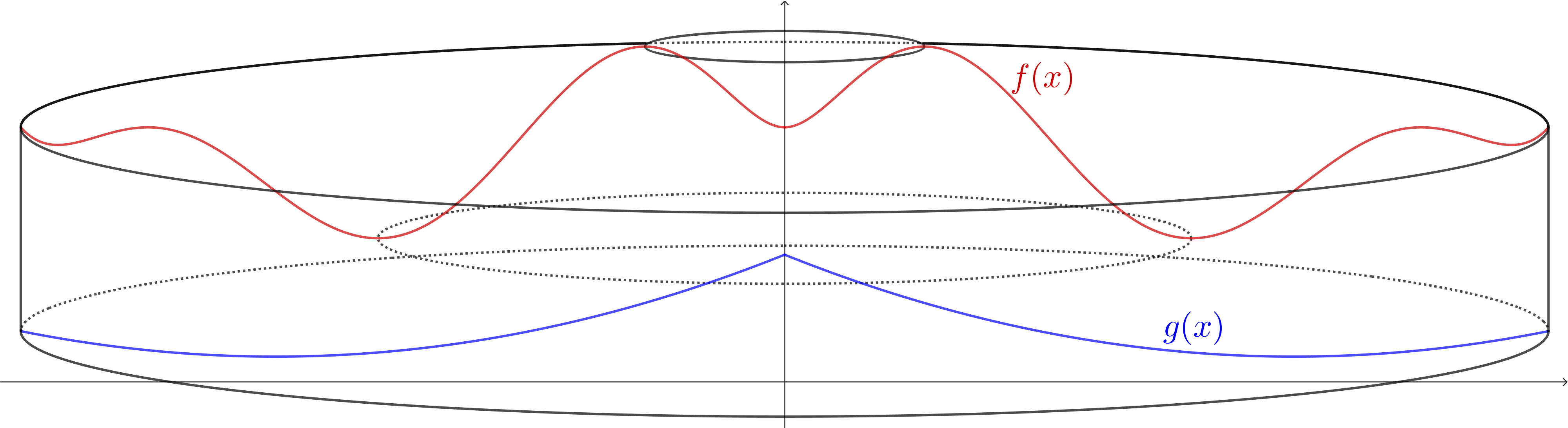
We’re going to look at the same solid as in Figure 6.3.2. But this time, when we define the 2-dimensional region that we’re going to revolve around the \(x\)-axis, we’re going to add a lower boundary function, \(g(x)\text{.}\)
If \(f\) and \(g\) are continuous functions with \(f(x)\geq g(x) \geq 0\) on the interval \([a,b]\text{,}\) then the volume of the solid formed by revolving the region bounded between the curves \(y=f(x)\) and \(y=g(x)\) from \(x=a\) to \(x=b\) around the \(x\)-axis is:
\begin{equation*}
V = \pi\int_{x=a}^{x=b}\left( (f(x))^2 - (g(x))^2 \right)\;dx\text{.}
\end{equation*}
This is called the Washer Method. Note that if \(g(x) = 0\text{,}\) then the resulting volume is:
\begin{equation*}
V = \pi\int_{x=a}^{x=b}\left(f(x)\right)^2\;dx\text{.}
\end{equation*}
We’ll walk through two examples where we construct these integral expressions before pretending to be too comfortable. Let’s start with something similar to what we’ve just done.
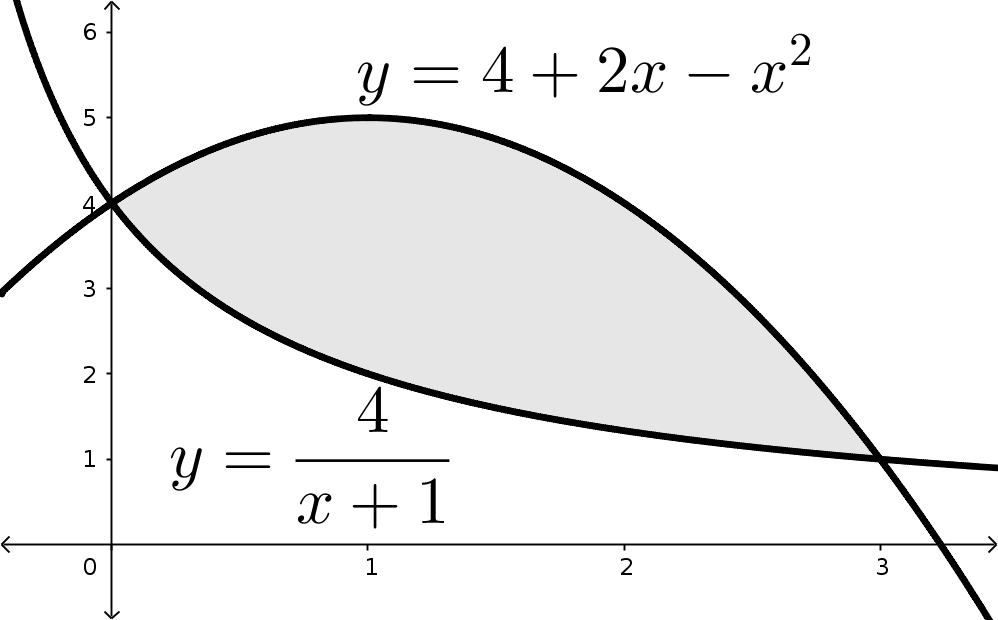
Consider the region bounded between the curves \(y=4+2x-x^2\) and \(y=\dfrac{4}{x+1}\text{.}\) We will create a 3-dimensional solid by revolving this region around the \(x\)-axis.
The first function, the quadratic, will be annoying to square. We’ll end up with some big degree 4 polynomial, though, and antidifferentiating will be easy, since we can use the Power Rule.
The second function squared will give us \(\dfrac{4}{(x+1)^2}\text{.}\) We can use a \(u\)-substitution here with \(u=x+1\text{.}\) Then, we have a negative exponent and we can use the Power Rule!
Ok, so when we’re creating these integrals, we really are focussing on using the rectangle we drew to show us which functions serve as the large radius compared to the small radius. In the next example, we’ll see another key thing to notice from a single rectangle.
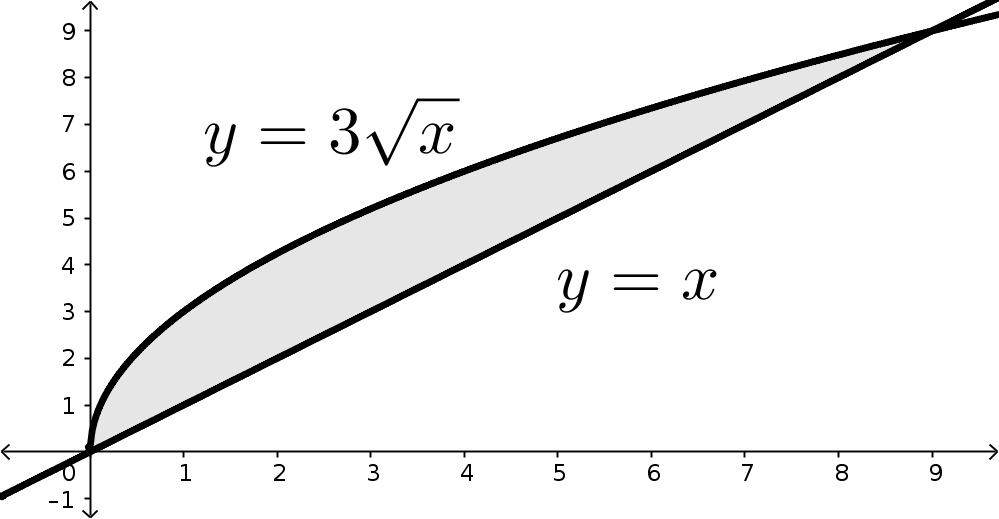
Now let’s consider another region: this time, the one bounded between the curves \(y=x\) and \(y=3\sqrt{x}\text{.}\) We will, again, create a 3-dimensional solid by revolving this region around the \(y\)-axis.
Note that this is a 2-dimensional shape, and we’re just finding the area of it. You’ll also notice that the radii are measuring a horizontal distance in terms of a differing height, so you’ll want to express these as functions of \(y\text{.}\)
The inner radius comes from the function \(y=3\sqrt{x}\text{,}\) but we’ll invert it be written as \(x=\left(\dfrac{y}{3}\right)^2\) or \(x=\dfrac{y^2}{9}\text{.}\)
Notice that the rectangle was the clue that we were going to be using \(\Delta y\) when we calculated volumes. This ended up being the reason that we integrated with regard to \(y\text{,}\) since the \(\Delta y\to dy\) in the integral.
Notice that, in all of the previous work we’ve done, we’ve drawn our rectangle so that it is standing perpendicular to the axis of revolution. This is the kind of rectangle that, when we revolve it, traces out the "washer" shape!
So what happens when we change the orientation of our rectangle? What happens when we draw a rectangle that is parallel to the axis of revolution? Let’s consider the same region as before (the one we visualized in Figure 6.3.7) with the same rectangle as before (the one we visualized in Figure 6.3.9), but we’ll revolve around the \(y\)-axis.
We want to focus on the single rectangle and the shape that it forms when we revolve it around the \(y\)-axis. From there, we can fall into our slice and sum process by thinking about how we might calculate the volume of this single sliced piece and then adding them up.
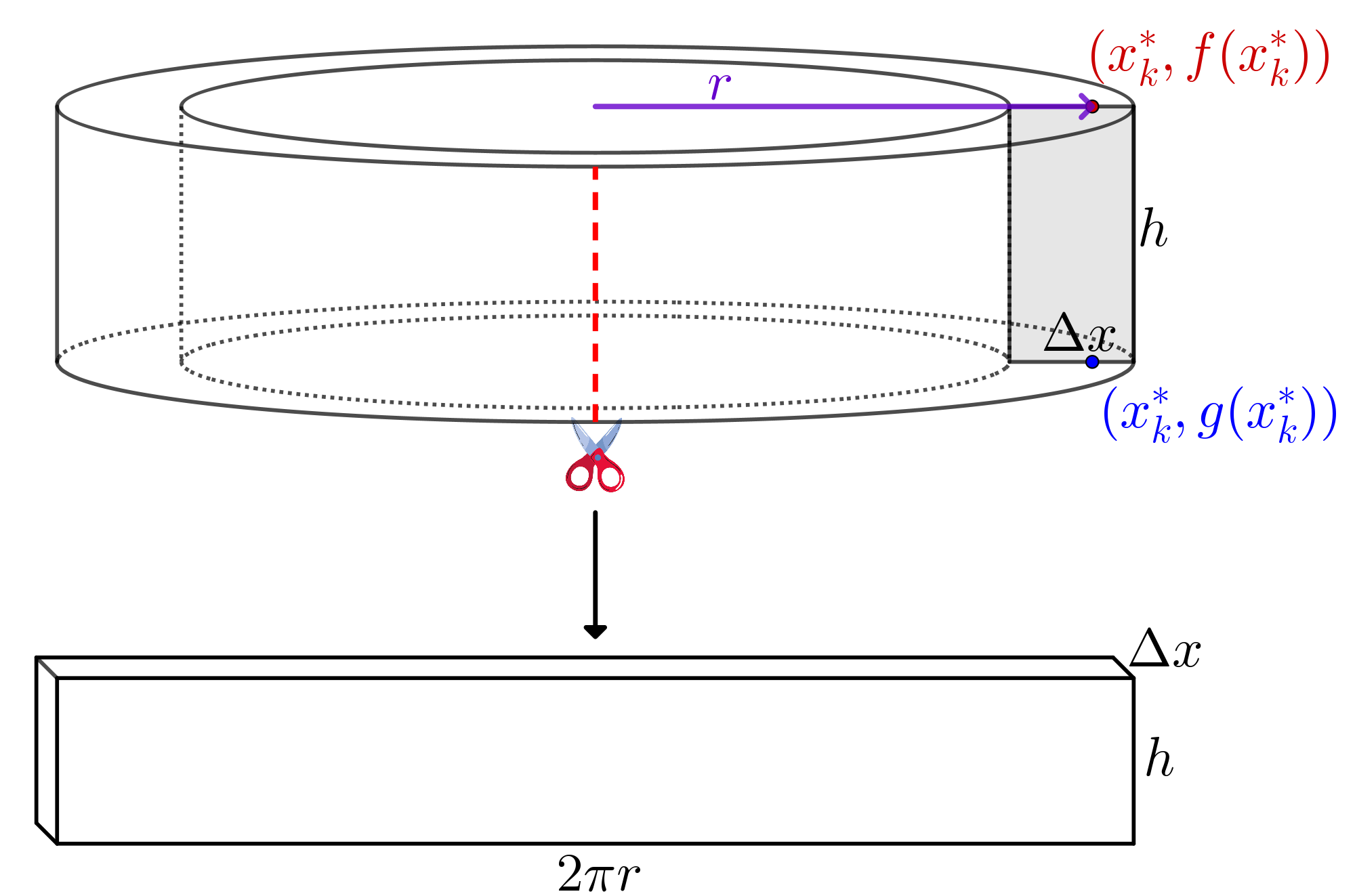
For this rectangle, we can notice that when we revolve it around the \(y\)-axis, we create a hollow cylinder. We’ll focus more specifically on this cylinder.
Let’s focus more on the cylinder. We’ll need to find the volume of this cylinder. We can think of this volume as really the surface area of the cylinder multiplied by the thickness. Another way to visualize it is to think about cutting the cylinder open, and unfurling it to create a rectangular solid with some thickness.
So we can see that to find \(V_k\text{,}\) we’re going to multiply \(A(x_k^*)\) and \(\Delta x\) again, where \(A(x_k^*)\) is the area of the cross-sectional "face." In this case, we can see how we’ll construct this from the unfurled cylinder.
\begin{align*}
V_k \amp= 2\pi r \Delta x \\
\amp = 2\pi (x_k^*)(f(x_k^*)-g(x_k^*))\Delta x\\
V \amp \approx \sum_{k=1}^n 2\pi (x_k^*)(f(x_k^*)-g(x_k^*))\Delta x\\
V \amp = \lim_{n\to\infty} \sum_{k=1}^n 2\pi (x_k^*)(f(x_k^*)-g(x_k^*))\Delta x\\
\amp = \int_{x=a}^{x=b} 2\pi x(f(x)-g(x))\;dx
\end{align*}
If \(f(x)\) and \(g(x)\) are continuous functions with \(f(x)\geq g(x)\) on the interval \([a,b]\) (with \(a\geq0\)), then the volume of the solid formed when the region bounded between the curves \(y=f(x)\) and \(y=g(x)\) from \(x=a\) to \(x=b\) is revolved around the \(y\)-axis is
\begin{equation*}
V = 2\pi \int_{x=a}^{x=b} x\left(f(x)-g(x)\right)\;dx\text{.}
\end{equation*}
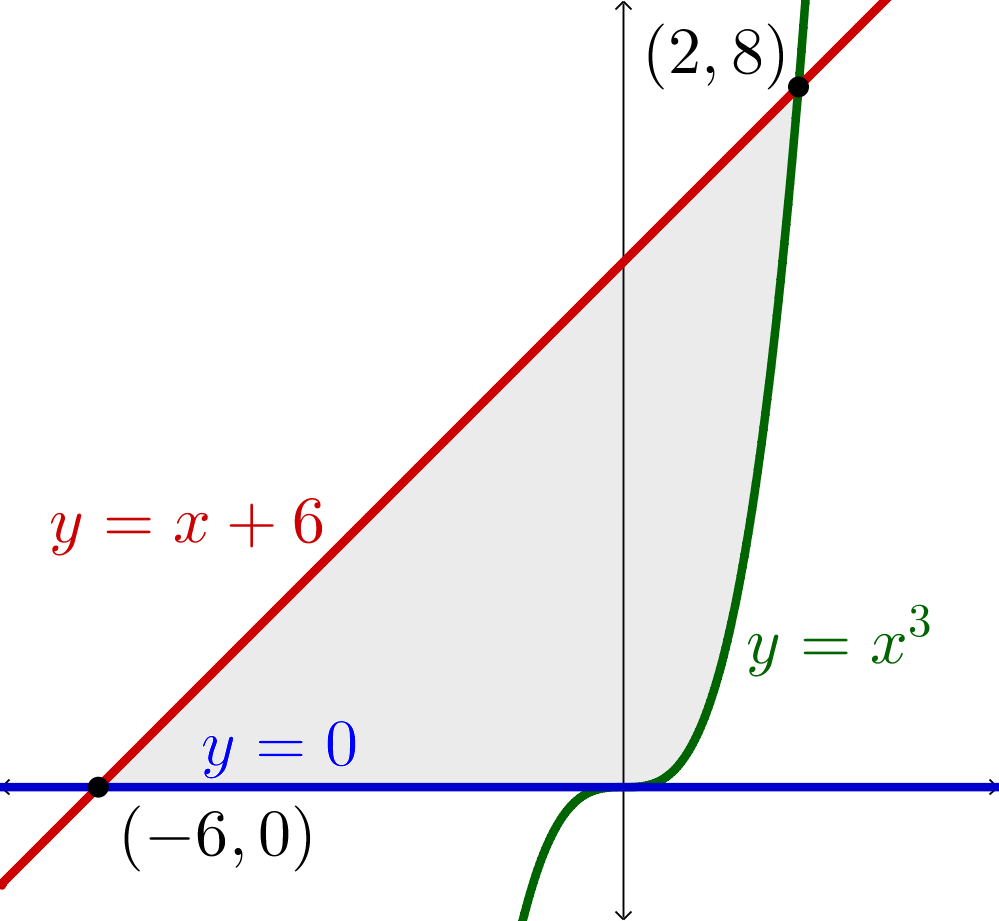
Let’s consider the region bounded by the curves \(y=x^3\) and \(y-x+6\) as well as the line \(y=0\text{.}\) You might remember this region from Activity 6.2.3. This time, we’ll create a 3-dimensional solid by revolving the region around the \(x\)-axis
Note that in this context, we’re actually using disks and washers. Also note that the bottom of the rectangles are bounded by \(y=0\) from \(x=-6\) to \(x=0\) and then switches to being bounded by \(y=x^3\) from \(x=0\) to \(x=2\text{.}\)
Now, draw a single rectangle in the region that is parallel to the axis of revolution. Use this rectangle to visualize the \(k\)th slice of this 3-dimensional solid. What does that single rectangle create when it is revolved around the \(x\)-axis?
To finish things up, let’s look at another interactive graph (similar to how we ended Section 6.2 Area Between Curves) that can help show the differences between finding volume with regard to \(x\) (using \(\Delta x\) in our rectangles and \(dx\) in our integrals) and finding volume with regard to \(y\) (using \(\Delta y\) in our rectangles and \(dy\) in our integrals), and how this choice changes our method from washers to shells depending on the axis of revolution.
We say that the volume of a solid can be thought of as \(\displaystyle \int_{x=a}^{x=b}A(x)\;dx\) where \(A(x)\) is a function describing the cross-sectional area of our solid at an \(x\)-value between \(x=a\) and \(x=b\text{.}\) Explain how this integral formula gets built, referencing the slice-and-sum (Riemann sum) method.
When do we integrate with regard to \(x\) (using a \(dx\) in our integral and writing our functions with \(x\)-value inputs) and when do we integrate with regard to \(y\) (using a \(dy\) in our integral and writing our functions with \(y\)-value inputs) when we’re finding volumes using disks and washers? How do we know?
For each of the solids described below, set up an integral using the disk/washer method that describes the volume of the solid. It will be helpful to visualize the region, a rectangle on that region, as well as the rectangle revolved around the axis of revolution.
Say we’re revolving a region around the \(x\)-axis to create a solid. Using the disk/washer method, we will integrate with respect to \(x\text{.}\) Using the shell method, we integrate with respect to \(y\text{.}\) Explain the difference, and why this difference occurs.
For each of the solids described below, set up an integral using the shell method that describes the volume of the solid. It will be helpful to visualize the region, a rectangle on that region, as well as the rectangle revolved around the axis of revolution.
Pick at least 2 integrals from Exercise 4 to rewrite using shells instead. What about those regions did you look for to choose which ones to rewrite and which ones to not?
Pick at least 2 integrals from Exercise 7 to rewrite using disks/washers instead. What about those regions did you look for to choose which ones to rewrite and which ones to not?
For each of the following solids, set up an integral expression using either the disk/washer method or the shell method. You don’t need to evaluate them, but you should do some careful thinking about how you set these up, especially as you choose between methods and what variable you are integrating with.